Aqui los videos de las finales del concurso nacional de sumobots del expociencia 2009.
Round final.
lunes, 9 de noviembre de 2009
sábado, 7 de noviembre de 2009
Aqui les dejo dos videos con la semifinales en el centro de convenciones en la ciudad de Puebla.
Ganamooos! somos campeones nacionales e iremos a los Robogames en S.F California woot...! haha mas alrato les subo los videos de la final y de la primera ronda.
Disfrutenla... A la izquierda Diablo I y a la derecha el Bulldog(our bot ;) ) haha disfrutenlos =D
Primer pelea
Segunda pelea
Ganamooos! somos campeones nacionales e iremos a los Robogames en S.F California woot...! haha mas alrato les subo los videos de la final y de la primera ronda.
Disfrutenla... A la izquierda Diablo I y a la derecha el Bulldog(our bot ;) ) haha disfrutenlos =D
Primer pelea
Segunda pelea
jueves, 5 de noviembre de 2009
martes, 3 de noviembre de 2009
lunes, 26 de octubre de 2009
NacoSumo Bulldog... Lo odiaras...
Actualmente he estado trabajando dos semanas en un proyecto de un sumobot, somos 4 integrantes; Peto (y su ibiza), Jesus Montiel, Heriberto Salinas y su servidor lem0n ;D, le hemos invertido bastante tiempo y esfuerzo ya que es el primer concurso que esta organizando nuestra universidad y es de forma nacional, nosotros ya tenemos experiencia con este tipo de robots, ya que el año pasado realizamos uno, sin embargo la calidad de trabajo se incremento excepcionalmente, ya que pues tenemos mucha mas experiencia y mejores conocimientos, yo me rfie toda la parte electronica y pues vaya que me han quedado muy bien las PCB, su reconocimiento del oponente sera de forma infrarroja y posicionaremos muy bien los sensores, la parte mecanica ya esta culminada(excelente trabajo de Heriberto) y la parte electronica igual, son 3 tarjetas.
La primera que hize es la del control de los QRD1114 los cuales son sensores infrarrojos, pero son reflexivos opticos, esta lleva una trigger schmitt negada(7414) para asi dar con precisión el 1 y 0 lógico, son 4 salidas de esta PCB que van directo al micro.

La otra es la que ya he posteado aqui es la del control de los motores electricos, con los puentes H l298 n, cabe mencionar que todo sera modulado con un PWM de entre 50 y 100%, ya unicamente manejamos esos dos rangos de frecuencia, para detección del oponente y para modo de combate.
Son 4 motores en total.
La otra es la motherboard o tarjeta madre, la cual contiene un zocalo zif de 28 pines, para nuestro micro el dsPic30F4012, esta tarjeta es básicamente el cerebro, y tiene conexiones directas con las otras dos, tmb posee 4 moc3031 para optoacoplar en la sálida, estos los pusimos debido a que parecia que regresaba corriente del puente H y "atontaba" nuestro micro, sin embargo gracias al Profe Aragon, pudimos resolverlo en minutos.



Bueno, les dejo imagenes del sumo, y espero que les guste, posteriormente pondre videos de pruebas de pelea y estrategia con el.



La primera que hize es la del control de los QRD1114 los cuales son sensores infrarrojos, pero son reflexivos opticos, esta lleva una trigger schmitt negada(7414) para asi dar con precisión el 1 y 0 lógico, son 4 salidas de esta PCB que van directo al micro.

La otra es la que ya he posteado aqui es la del control de los motores electricos, con los puentes H l298 n, cabe mencionar que todo sera modulado con un PWM de entre 50 y 100%, ya unicamente manejamos esos dos rangos de frecuencia, para detección del oponente y para modo de combate.
Son 4 motores en total.
La otra es la motherboard o tarjeta madre, la cual contiene un zocalo zif de 28 pines, para nuestro micro el dsPic30F4012, esta tarjeta es básicamente el cerebro, y tiene conexiones directas con las otras dos, tmb posee 4 moc3031 para optoacoplar en la sálida, estos los pusimos debido a que parecia que regresaba corriente del puente H y "atontaba" nuestro micro, sin embargo gracias al Profe Aragon, pudimos resolverlo en minutos.



Bueno, les dejo imagenes del sumo, y espero que les guste, posteriormente pondre videos de pruebas de pelea y estrategia con el.



martes, 6 de octubre de 2009
Puentes H (L293 y L298)
Aqui una breve reseña sobre los puentes H, los cuales son un circuito que permite el control de giro (sentido) de motores electricos, los mas comunes son el L293B y L293D, estos son útiles para proyectos que usen únicamente cargas no mayores a 1.5 A, en el caso del L293B y de 600mA(L293D).
Sin embargo actualmente estoy realizando un sumobot, y para los cuales usare 1.6A, por lo que he conseguido el L298N el cual provee mayor capacidad en amperaje y voltaje, llegando a 42v y arriba de 4 amperes.
Aqui les dejo al final unas fotos de las pcb de los puentes H del sumobot y una breve reseña de lo que son los puentes H.
El puente H es una interfaz que se considera básicamente como un sistema de conmutación controlado por dos señales digitales de baja potencia, generalmente es utilizado para el control de giro de los motores. cuando el sistema detecta un 1 lógico en una de sus dos entradas de control y un cero en la otra, este conecta el motor a la fuente de alimentación con determinada polaridad si la señal de control que estaba en 1 pasa a cero y la de cero a uno el PUENTE H conecta la fuente al motor con la polaridad invertida facilitando así el giro en sentido contrario.
Facilmente se puede realizar un puente H con componentes discretos aqui un ejemplo:

El puente H es muy fácil de implementar trabaja con tan solo 4 transistores 2 NPN y 2 PNP, y una fuente de alimentación, su funcionamiento es muy sencillo y lo describiré a continuación(para motores): la conflagración que se establece hace que un transistor se coloque en corte y el otro en saturación lo que enviara un 1 y 0 lógico a la base de la otra pareja de transistores que permitirá que el motor se polarize con positivo y negativo, si queremos que el motor gire en otro sentido cambiamos las condiciones de corte y saturación en los otros transistores y el motor invertirá su giro.
El tipo de transistores a usar dependera de la potencia que tenga el motor y la corriente que consuma.
Existen tambien puentes H integrados tales como el L293D, en resumen este tipo de circuitos integrados traen en su interior 2 puentes H independientes teniendo las entradas para el control de giro y una entrada de enable (usada comunmente como entrada PWM), cabe destacar que en estos circuitos se usa una alimentacion para el CI y una para los motores, lo que permite que se puedan manejar cargas relativamente exigentes. La logica de control es compatible con niveles TTL y CMOS.

Placas con el L298N.


Sin embargo actualmente estoy realizando un sumobot, y para los cuales usare 1.6A, por lo que he conseguido el L298N el cual provee mayor capacidad en amperaje y voltaje, llegando a 42v y arriba de 4 amperes.
Aqui les dejo al final unas fotos de las pcb de los puentes H del sumobot y una breve reseña de lo que son los puentes H.
El puente H es una interfaz que se considera básicamente como un sistema de conmutación controlado por dos señales digitales de baja potencia, generalmente es utilizado para el control de giro de los motores. cuando el sistema detecta un 1 lógico en una de sus dos entradas de control y un cero en la otra, este conecta el motor a la fuente de alimentación con determinada polaridad si la señal de control que estaba en 1 pasa a cero y la de cero a uno el PUENTE H conecta la fuente al motor con la polaridad invertida facilitando así el giro en sentido contrario.
Facilmente se puede realizar un puente H con componentes discretos aqui un ejemplo:
El puente H es muy fácil de implementar trabaja con tan solo 4 transistores 2 NPN y 2 PNP, y una fuente de alimentación, su funcionamiento es muy sencillo y lo describiré a continuación(para motores): la conflagración que se establece hace que un transistor se coloque en corte y el otro en saturación lo que enviara un 1 y 0 lógico a la base de la otra pareja de transistores que permitirá que el motor se polarize con positivo y negativo, si queremos que el motor gire en otro sentido cambiamos las condiciones de corte y saturación en los otros transistores y el motor invertirá su giro.
El tipo de transistores a usar dependera de la potencia que tenga el motor y la corriente que consuma.
Existen tambien puentes H integrados tales como el L293D, en resumen este tipo de circuitos integrados traen en su interior 2 puentes H independientes teniendo las entradas para el control de giro y una entrada de enable (usada comunmente como entrada PWM), cabe destacar que en estos circuitos se usa una alimentacion para el CI y una para los motores, lo que permite que se puedan manejar cargas relativamente exigentes. La logica de control es compatible con niveles TTL y CMOS.
Placas con el L298N.


domingo, 20 de septiembre de 2009
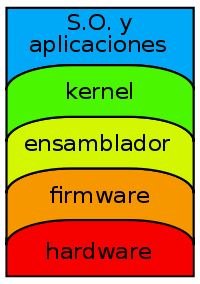
capas de abstraccion del hardware.
Es un honor para mi haber sido tomado en cuenta para colaborar en este blog, sin mas rodeos entremos en materia.
Para cualquier programador ya sea profesional o novato es escencial conocer como estan organizadas las distintas capas de abstraccion del hardware, esto con el fin de adecuar nuestros programas a nuestras necesidades.
Una capa de abstraccion no es mas que una forma de ocultar los detalles de la implementacion de ciertas funcionalidades.
Una capa de abstraccion del hardware es un elemento del sistema operativo que funciona como una interfaz entre el software y el hardware del sistema, proveyendo una plataforma de hardware consistente sobre la cual correr las aplicaciones.
por ejemplo: Un programador queriendo imprimir en pantalla un texto en C++ tan solo tendra que hacer referencia a la instrucion "printf("texto");" sin tener que preocuparse de escribir esa informacion de forma binaria sobre el "framebuffer*".
En este caso es el compilador el que se encarga de traducir esta instruccion interactuando con el sistema operativo a travez de la capa de abstraccion de hardware, ocultando los detalles del hardware hacia el programador, con esto podemos entender que las aplicaciones no corren directamente sobre el hardware.
Una de las mayores ventajas de las capas de abstraccion de hardware es hacer que las aplicaciones sean independientes del hardware.
Me despido no sin antes agradecer la invitacion.
viernes, 18 de septiembre de 2009
Nacobot el inicio....
Eramos un grupo entusiasta de primer semestre de la carrera en Lic. en ciencias de la electronica(carrera que yo deje) y estabamos en sueños guajiros para formar un Robot automata(ahora ya lo sabemos programar haha) el cual reconociera los estimulos mas bajos que se le dieran, para que este interactuara directamente con el ser humano, este tiene que responder de manera prioritaria a las groserias y albures que se le dijeran, dandoles vuelta u ofendiendo de manera mas directa al usuario, es un robot automata (retomo la palabra) que iba aprender lo que se le dijera y es capaz de moverse a placer, para poder obtener nuevo conocimiento, este automata es capaz de responder de forma gráfica sus respuestas por medio de un display, dando distintos tipos de emociones dependiendo de su reacción.
El grupo se desintegro kedando solamente pachon y yo...
Ahora queremos llevar ese proyecto a cabo y en base a todo lo anterior hemos creado varios proyectos que posteriormente les iremos enseñando; al igual que todo lo referido al blog y proyectos individuales D: saludos!
El grupo se desintegro kedando solamente pachon y yo...
Ahora queremos llevar ese proyecto a cabo y en base a todo lo anterior hemos creado varios proyectos que posteriormente les iremos enseñando; al igual que todo lo referido al blog y proyectos individuales D: saludos!
El inicio!
Buenos dias! son las 6:12 AM! del 18 de septiembre del 2009, mi nombre es Alvaro Mariano Limón Lares y soy estudiante de Ing.Mecatrónica en Puebla México. He creado este Blog para dar noticias nuevas sobre Tecnnologia, ciencia, gadgets y lo que más me gusta; electrónica y robótica.
Aquí les pondre adelantos de algunos proyectos en los que trabajamos otro grupo de amigos y yo, haha asi como herramientas que les sirvan a todos los demas que nos visiten.
Pero a todo esto? Nacobot?, haha bueno ese es el nombre que le asignamos a nuestro laboratorio y ya mas que nada por la costumbre.
Espero encuentren entretenido el sitio, intentaremos optimizar el blog lo mas seguido, kk! Have fun!
Aquí les pondre adelantos de algunos proyectos en los que trabajamos otro grupo de amigos y yo, haha asi como herramientas que les sirvan a todos los demas que nos visiten.
Pero a todo esto? Nacobot?, haha bueno ese es el nombre que le asignamos a nuestro laboratorio y ya mas que nada por la costumbre.
Espero encuentren entretenido el sitio, intentaremos optimizar el blog lo mas seguido, kk! Have fun!
Suscribirse a:
Comentarios (Atom)